Инструменты пользователя
Боковая панель
start:программное_обеспечение:авион
Содержание
АВИОН
Скачать актуальную версию программы - 1.5.66.3
Скачать версию программы 1.5.57
Протокол обмена
Руководство администратора
Руководство оператора
Руководство по интеграции
Настройка программы АВИОН
Данные настройки актуальны для версии АВИОН 1.5.66.3 и выше
Вкладка "Настройка"

Вкладка «Настройка»
Серийный номер весов: указывается для каждых весов индивидуально
НПВ: Наибольший Предел Взвешивания указывается в соответствии с документацией
Дискрета: указывается в соответствии с документацией
Интервал: 4
Коррекция: 0
Фильтр кода: 7
Порог веса: 400-900
Фильтр статики: 200
Гистерезис: 0.00
Порог автообнуления: 0
Диапазон вх. сигнала: 0mV +20mV
Смещение вх. сигнала: 0
Питание датчика: Переменное
Частота АЦП: 900Гц/ 300Гц
Тип данных: 24-битные
Фильтр: 0
Автозапись графиков: данная настройка нужна для диагностики весов
Тестовая дискрета: данная настройка нужна для диагностики весов
Включить автообнуления: при работе с программой Статика 3 данная настройка не нужна
Настройки указанные ниже нужны для выбора алгоритма работы с программой «Статика 3»
[Оси только по заезду] - при данной настройке в «Статике 3» должна стоять галочка [Оси на весах]
[Оси только по съезду] - при данной настройке в «Статике 3» должна стоять галочка [Использовать FixStat]
Рабочие настройки для старых версий программы АВИОН
Актуально до верии программы АВИОН 1.5.57
Скорость обмена: строго 57600
Начиная с версии 1.5.50 можно выставлять частоту 600, 115200
Вкладка "Настройка"
Интервал: 5
Коррекция: 30
Фильтр кода: 10
Порог веса: 700-900
Фильтр статики: 50
Остальные настройки, как на картинке ниже (для 8 датчиков):
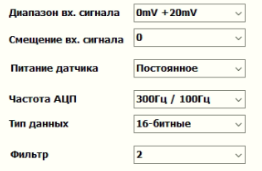
Для 10 датчиков использовать частоту АЦП 250/83Гц
FixStat - фиксация стабилизации от весов
При работе с ПО Статика 3, если в настройках этого ПО выставлена опция Использовать FixStat, в ПО АВИОН следует настроить таймаут фиксации в файле Sar.ini. Значение выставляется порядка 6-7 сек.
Лишние оси, склейка осей
Для обеспечения минимизации ложных срабатываний взвешивания осей в настройках ПО АВИОН следует выставить значение поля Порог веса более или равное 700кг.
Альтернативный способ взвешивания (без съезда ТС с весов после стабилизации)
Начиная с ПО АВИОН версии .48 появилась возможность взвешивать ТС и получать результаты по осям без ожидания съезда этого ТС полностью или первой осью с весов. Для этого следует включить опцию Оси по заезду в настройках.
Для использования этого способа весы АВИОН должны быть установлены в приямок на одном уровне с подъездными участками либо иметь низкие пандусы.
Для автоматической работы ПО АВИОН и ПО Статика 3 нужно в настройках весового комплекса включить распознавание.
Данный способ в ПО Статика 3 будет работать так, как если бы работа шла с обычными ВА. В случае использования датчиков положения - программа будет ждать, пока ТС не выровняется на весах корректно, после чего запросит перерасчёт осей с учётом новой массы.
ВАЖНО! Для взвешивания подобным образом следует:
1. Калибровать весы тем же способом. Нельзя эксплуатировать весы, откалиброванные одним способом, а взвешивать другим;
2. Включить опцию в ПО Статика 3 Оси на весах в настройках.
1. Калибровать весы тем же способом. Нельзя эксплуатировать весы, откалиброванные одним способом, а взвешивать другим;
2. Включить опцию в ПО Статика 3 Оси на весах в настройках.
Проблема двух осей
В некоторых случаях, особенно при работе с MOXA без АИП, возникают случаи, когда в результатах по осям приходят «склеенные» две оси. Например, грузовик 5-осный, а приходят распределённые из 5 осей по суммам 2 оси. Проблема решается обнулением АВИОНа перед заездом или после съезда ТС.
Техническая поддержка ПО: it@tenso-m.ru
Сервисный центр: srv@tenso-m.ru
Другие вопросы и пожелания: faq@tenso-m.ru
start/программное_обеспечение/авион.txt · Последнее изменение: 15.04.2025 14:36 — it